 异常教程
异常教程
Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板
💡一则或许对你有用的小广告
欢迎加入小哈的星球 ,你将获得:专属的项目实战(已更新的所有项目都能学习) / 1v1 提问 / Java 学习路线 / 学习打卡 / 每月赠书 / 社群讨论
- 新开坑项目:《Spring AI 项目实战》 正在持续爆肝中,基于 Spring AI + Spring Boot 3.x + JDK 21..., 点击查看 ;
- 《从零手撸:仿小红书(微服务架构)》 已完结,基于
Spring Cloud Alibaba + Spring Boot 3.x + JDK 17...,点击查看项目介绍 ;演示链接: http://116.62.199.48:7070 ;- 《从零手撸:前后端分离博客项目(全栈开发)》 2 期已完结,演示链接: http://116.62.199.48/ ;
截止目前, 星球 内专栏累计输出 100w+ 字,讲解图 4013+ 张,还在持续爆肝中.. 后续还会上新更多项目,目标是将 Java 领域典型的项目都整一波,如秒杀系统, 在线商城, IM 即时通讯,权限管理,Spring Cloud Alibaba 微服务等等,已有 3700+ 小伙伴加入学习 ,欢迎点击围观
这是迷你系列的 第 3 部分 。在第 2 部分中,我描述了如何设置开发工具和调试第一个项目(参见“ 教程:Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板 - 第 2 部分:软件工具 ”)。现在是研究软件概念的时候了。目标是使用 Freescale FRDM-K64F 板驱动 Adafruit 的 NeoPixel (WS2812B):
![]()
Adafruit 8×8 NeoPixel Shield 与 Freescale FRDM-K64F 板
迷你系列教程列表
- 教程:Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板 – 第 1 部分: 硬件
- 教程:Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板——第 2 部分: 软件工具
- 教程:Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板——第 3 部分: 概念
- 教程:Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板 – 第 4 部分: 定时器
- 教程:Adafruit WS2812B NeoPixels 与 Freescale FRDM-K64F 板 – 第 5 部分: DMA
大纲
本文介绍了与 WS2812B(或 Adafruit NeoPixel)LED 对话的协议和时序。它解释了一种使用定时器和 DMA 来满足硬件要求的方法。我将 GNU ARM Embedded(launchpad)工具与基于 Eclipse 的 IDE(Freescale Kinetis Design Studio v3.0.0)一起使用。作为软件驱动程序,我使用的是 Freescale Kinetis SDK v1.2。
WS2812 链接
WS2812(B) LED 具有带移位寄存器的内置电流驱动器:将数据写入移位寄存器将锁存位,恒流驱动器将电流“驱动”到 LED 的红色、绿色和蓝色部分引领。
数据写入单线(DIN 引脚)链中的第一个 WS2812。第一个设备将“保留”前 24 位,其他所有内容都移出到 DOUT 引脚。因此,为了向 2 个 LED 提供数据,我移动了 2x24 位:前 24 位用于链中的第一个设备,接下来的 24 位用于链中的下一个设备,依此类推。

WS2812 LED链(来源: https://cpldcpu.wordpress.com/2014/01/14/light_ws2812-library-v2-0-part-i-understanding-the-ws2812/ )
WS2812颜色信息
每个 LED 需要 24 位,用 8 位编码绿色、红色和蓝色。所以是GRB,不是RGB!每个颜色 8bit 决定该颜色的亮度,从 0x00(关闭)到 0xff(全亮度)。这些位首先发送 MSB(最高有效位)。
要以全亮度打开 LED 的红色部分,同时关闭蓝色和绿色,我必须发送以下位:
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
要让所有 (GRB) LED 的亮度减半,我发送
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
WS2812时序
WS2812/B 需要这些位的特殊时序。我强烈推荐阅读 Tim 关于 WS2812 时序的文章(“ Light_WS2812 library V2.0 – Part I: Understanding the WS2812 ”):

WS2812时序(来源: https://cpldcpu.wordpress.com/2014/01/14/light_ws2812-library-v2-0-part-i-understanding-the-ws2812/ )
WS2812B 是永远不变的,并且时序略有不同。较新的 Adafruit NeoPixels 都是 WS2812B。由于时序有一些公差,我使用以下“0”和“1”位的时序来驱动它:
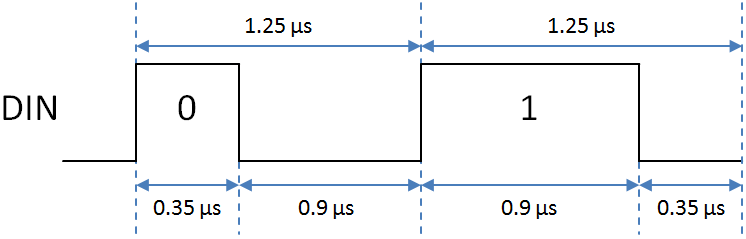
WS2812B时序
生成比特流
有几种可能的方式来生成这样的比特流。一种方法是使用具有 Bit-Banging 的 GPIO(通用 I/O)引脚(通过正常的 GPIO 端口操作切换输出引脚):
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
一个甚至改进的版本是避免检查位:
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0

写入端口位以生成信号
现在将所有位放入一个数组中,然后像这样将其流出:
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
但是信号频率是800 kHz!所以 Bit-Banging 不会工作,除非你使用手工制作的汇编代码来达到速度和时间。此外,我还必须禁用中断,因为任何中断也会搞砸时间!关闭一些 LED 的中断会起作用,但 LED 链越长,中断必须关闭的时间就越长。绝对不够好。
使用定时器
与其在循环中完成所有事情,为什么不使用定时器中断呢?基本上设置三个定时器中断,每个中断以 800 kHz 的频率触发,并且定时偏移以匹配 WS2812 定时。所以我可以使用一个定时器和三个通道:在相应的中断中,我可以写入 DATA 以生成位时序:
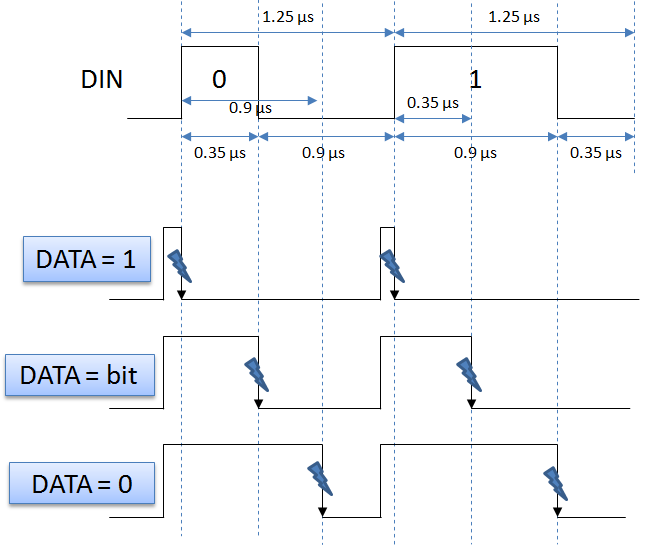
使用定时器中断驱动位
现在这比在循环中做事要好得多。这仍然意味着中断以 3×800 kHz 的频率发生,或者每 ~0.35 µs 发生一次中断!哎呀!我的系统几乎一直忙于中断:对于每个中断,CPU 都需要堆栈寄存器,将连接更改为中断服务例程,在例程中对 DATA 寄存器执行操作并返回原来的语境。很多操作!
使用 DMA
因此,如果切换一个引脚太慢,使用中断会产生太多中断,为什么不找到一种让它更快的方法呢?对此的解决方案是 DMA(直接内存访问) 。 DMA 允许在不使用 CPU 的情况下进行 todo 操作。 DMA 允许我读/写内存(以及更多),就像一种协处理器。
我还在用那个定时器。但是我会在后台触发“直接内存操作”,而不是触发中断,要求将我的数据直接写入(内存映射的)DATA 寄存器:

使用 DMA 驱动位
这样操作就可以在后台进行,无需 CPU 参与 :-) 。好消息是:许多现代微控制器都具有 DMA 功能,并且 FRDM-K64F 板上的 Kinetis K64F 也具有它 :-) 。
概括
在这篇文章中,我解释了生成正确的比特流以驱动 WS2812B NeoPixels 背后的概念。由于信号是高频信号,我必须使用带 DMA 的定时器,否则 CPU 会负载过多。
在下一篇文章中,我将使用 Kinetis SDK 实现定时器。敬请期待……
链接
- 了解WS2812和WS2812B的时序: https://cpldcpu.wordpress.com/2014/01/14/light_ws2812-library-v2-0-part-i-understanding-the-ws2812/
- NeoPixels 上的 Adafruit 指南: https ://learn.adafruit.com/adafruit-neopixel-uberguide/overview
- Freescale Freedom FRDM-K64F 开发板: http://www.freescale.com/webapp/sps/site/prod_summary.jsp ?code=FRDM-K64F
- 飞思卡尔 Kinetis 设计工作室: http://www.freescale.com/kds
- 飞思卡尔 Kinetis SDK: http://www.freescale.com/kds